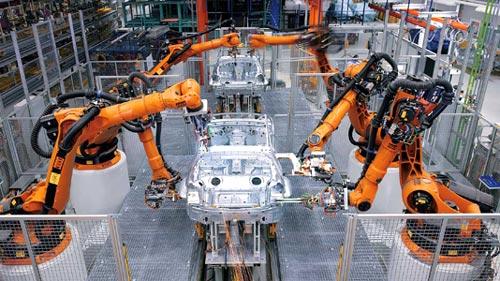
대량 생산을 위한 자동화 시스템에서 주목받던 산업용 로봇은 현재 인간과 공존이라는 대명분하에 인간의 생활공간 확장과 삶의 질을 높이는데 기여하기 위해 변신 중이다. 이러한 트랜드 변화에서 로봇이 그 주연을 담당하기 위해 예상되는 핵심구성요소는 구동기, 메커니즘, 제어 및 지능, 배터리 등을 들 수 있다.
사람의 팔을 움직이는 힘의 근원은 근육이다. 그것은 부드럽고 직선적으로 신축하여 힘을 내는데, 그 변위량은 비교적 작다. 사람의 팔은 가장 많이 움직이어도 관절각은 기껏 180도 , 가장 많이 오므려도 0도 정도이다. 그리고 근육은 오므릴 때 힘을 내지만 늘릴 때에는 힘을 내지 않는다. 그 때문에 근육은 뼈 양측에 배치되며 어느 편 근육을 사용함으로 팔을 오므리거나 펴거나 하는 운동을 한다.
이에 비해서 로봇을 포함한 기계 장치의 구동은 전기모터에 의한 회전력, 공기압 실린더, 유압 실린더에 의한 전자식 제어 시스템(PBW : Power-by-Wire)이 대부분이다. 로봇을 움직이는 근원은 이와 같은 회전 또는 직선의 액추에이터이다.
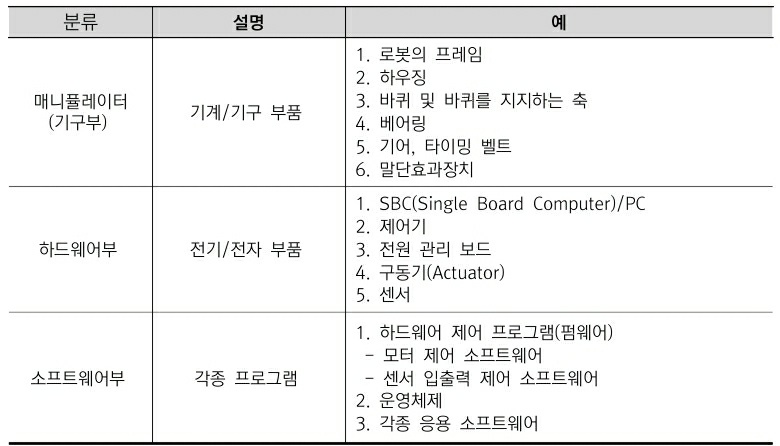
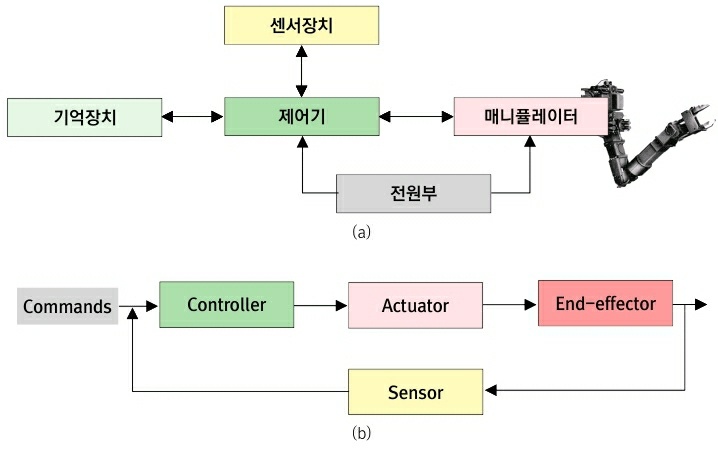
로봇의 구성을 세밀히 구분하면 다음과 같다.
1) 매니퓰레이터(기구부: Manipulator): 링크 및 관절로 구성된 로봇의 몸체.
2) 말단효과장치(End effector): 로봇의 마지막 관절에 연결된 로봇 손, Gripper
3) 액츄에이터(구동기: Actuator): 기구의 근육에 해당됨(servo motor, stepper motor, pneumatic and hydraulic cylinder)
4) 센서(Sensor): 관절의 위치를 제어기에 보냄(potentiometer, encoder)
5) 제어기(Controller): 센서의 정보를 이용하여 구동기의 동작을 제어함.(소뇌)
6) 처리기(Processor): 로봇 관절의 동작과 속도 등을 계산함.(두뇌부)
7) 소프트웨어(Software): 실시간으로 로봇 관절 제어 및 기구부의 위치, 속도제어.
[로봇의 구성요소]
착용형 로봇
ㆍ로봇이 산업현장에서 차지하는 비중이 점점 더 커짐에 따라 불가피하게 사람과 로봇이 함께 일 해야 하는 상황이 수없이 발생한다. 이러한 환경에서 발생하는 안전사고는 우리에게 안전한 로봇에 대한 숙제를 던져준다. 실제로 2001년 29세의 작업자가 'Gantry Robot'과의 충돌로 얻은 부상 때문에 사망하고, 1999년에는 작업자가 육류 포장공장에서, 작동시키면 로봇이 위로 위치하게 되어있는 센서를 잘못 건드려 두개골 손상으로 사망하는 사건이 발생 하였다. 이에 사람과 로봇의 협력과 공존을 목적으로 하는, 믿을 수 있고 안전한 물리적 상호작용을 가능케 하는 기술 구현을 목표로 하는 대규모 프로젝트가 EU를 중심으로 진행중 이다.
ㆍ착용형 로봇은 개념상 로봇이 동작하는 동안 착용자와 지속적으로 물리적 접촉이 발생하기 때문에 인간과 로봇 사이에 보다 긴밀한 상호작용 이해가 필요하다. 만약 이의 문제로 착용 로봇에서 오동작이 발생한다면 이는 착용자의 큰 부상으로 직결되기 때문에 상호작용 특성 기반 제어, 디자인, 메커니즘 구성에 각별한 주의를 기울여야 한다.
ㆍ착용형 로봇에서 일반적인 제어목표는 착용자의 동작의도를 파악하여 그 의도 동작을 원활 히 수행하고 동작에 따른 힘을 지원하는 것이다. 착용자의 동작에 관한 의도는 선 의도 파악과 후 의도 파악으로 나눌 수 있다. 선 의도 파악 기술로는 동작이 발생하기 전 인간의 뇌에서 발생하는 동작 지령 및 생각에 관해 뇌 신경사이에서 전기 신호를 측정하여 의도를 파악하는 방법, 근육 활성화 시 측정 가능한 전기 신호를 포착하여 동작이 활성화되기 전 상태를 인지하여 의도를 파악하는 기술 등이 대표적이다. 후자는 동작이 발생하면서 측정 가능한 위치, 속도, 가속도, 힘 등의 물리적인 변화량을 계측하여 동작 상태를 파악하는 것이다. 특히, 착용자가 로봇에 직접 가하는 힘을 측정하거나 로봇 구동기에 인가되는 부하를 전류나 전압으로 모니터링 하여 동작 의도를 측정하는 기술이 대표적이다 할 수 있다.
로봇의 구성요소
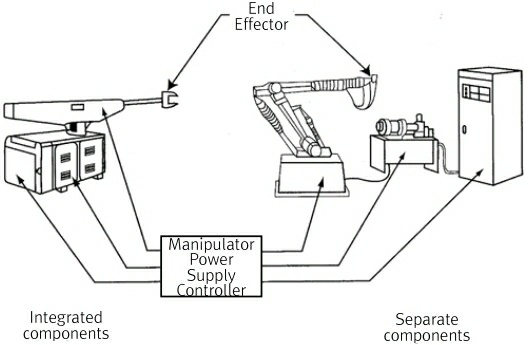
산업용 로봇의 구성
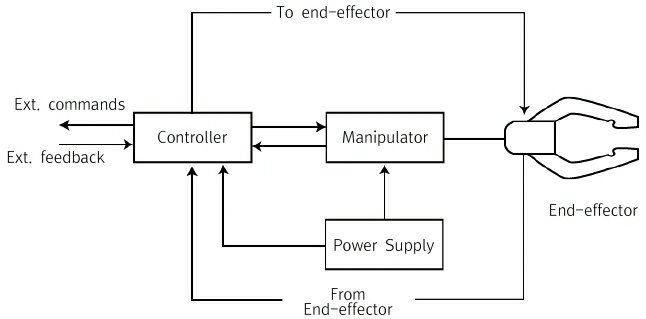
로봇 시스템의 구성도
'IT' 카테고리의 다른 글
| 매니퓰레이터 - 자유도(degree of freedom), 아이언맨 (0) | 2021.05.20 |
|---|---|
| 매니퓰레이터(Manipulator) - 조인트(prismatic, lower pair) (0) | 2021.05.20 |
| 진화하는 로봇 산업과 사회 (0) | 2021.05.19 |
| 유비쿼터스 시대의 로봇 : 유비봇(소봇, 인봇, 모봇), 로보 사피엔스 (0) | 2021.05.19 |
| 로봇의 개발분야 (아시모프, 아이로봇) (0) | 2021.05.19 |



