
자유도
자유도(degree of freedom)란 관절에서 허용되는 독립적인 움직임 방향의 수를 말한다. 일반적으로 매니퓰레이터는 작업 공간 내에 임의의 위치에서 임의의 자세를 취하기 위해서는 적어도 6자유도가 필요하다. 즉 3관절은 매니퓰레이터의 도구가 원하는 위치로, 또 다른 3관절은 원하는 자세(방향)로 되기 위해서 사용이 된다. 이러한 자유도는 작업종류에 따라 반드시 6 자유도의 매니퓰레이터를 사용할 필요가 없다.
그러나 매니퓰레이터의 도구가 장애물을 피하여 목표점에 도달한다든지 하는 원하는 경로를 지나기 위해서는 더 많은 관절을 필요로 하는 경우가 있으며, 자유도가 7이상인 매니퓰레이터를 여유자유도(redundant DOF)를 갖는 매니퓰레이터라고 한다.
방향을 나타내기 위한 3DOF

로봇의 손목과 관련한 3 자유도

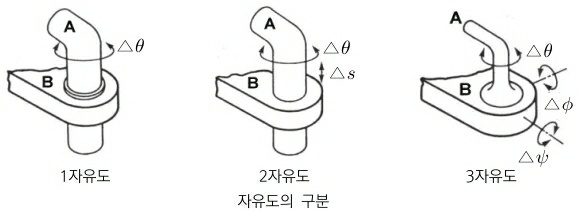
관절에서의 자유도 (degree of freedom)
관절이 3개의 기본적인 운동면 모두에서 움직임이 허용될 때 각운동에 대한 자유도는 3도까지 가질 수 있다. 예를 들어 위 그림에서 보여주는 것과 같이, 어깨관절은 자유도 3의 각운동을 갖고 있다. 손목관절은 자유도 2만을 갖고 있으며(시상면과 이마면 내에서의 돌림운동), 팔꿉관절은 자유도 1만을 갖는다(시상면 내에서의 돌림운동).
일반적으로 자유도라는 용어는 관절에서 허용된 각운동의 면들(planes of angular motion) 의 수를 나타낸다. 그러나 공학의 관점에서 엄격하게 본다면 자유도는 각운동뿐만이 아니라 병진(선형)운동에도 적용된다. 인체에 있는 모든 윤활관절들은 근육에 의해 능동적으로 유발되거나 관절 구조 내의 자연적 느슨함에 의해 수동적으로 유발되는 약간의 병진운동을 갖고 있다.
대부분의 관절에서 일어나는 약간의 수동적 병진운동을 부가적 움직임(accessory movement 또는 관절놀이, joint play)이라 하고 3개의 선형(linear)운동 방향으로 흔히 정의된다. 해부학적 자세에서 부가적 움직임의 공간적 방위와 방향은 3개의 돌림축을 이용하여 설명될 수 있다. 예를 들어, 이완되어 있는 어깨 관절에 있어 위팔뼈는 앞-뒤, 안-가쪽, 위-아래 방향으로 수동의 병진운동을 할 수 있다.
많은 관절에 있어 병진운동의 양은 임상적으로 관절의 건강함을 검사하기 위해 사용된다. 관절에 대해 뼈가 과도하게 병진운동 한다면 인대 손상이나 비정상적인 느슨함이 있다는 것을 의미한다. 이와는 대조적으로 병진운동(부가적 움직임)에서의 확실한 감소는 관절주위 결합조직 에서의 병적인 뻣뻣함이 있다는 것을 의미한다. 관절에서의 비정상적인 병진운동은 능동운동의 질적인 특성에 영향을 미침으로써 미세외상의 가능성과 관절속 스트레스의 증가를 유발할 것으로 생각된다.
자유도(DOF)
■ 자유도(degree of freedom: DOF) : 역학적인 계가 주어진 구속조건을 위배함이 없이 움직 일 수 있는 독립된 가지 수를 그 계의 자유도라고 한다. 정확하게는 구속조건을 위배함이 없는 어떤 운동에 대하여 그 계안에서 모든 입자들의 속도를 결정하기 위하여 규정되어져야 만 하는 양들의 수를 말한다.
ㆍ예를 들면, 공간 안에서 움직이는 한 입자는 3개의 자유도를 갖지만, 하나의 곡선을 따라서 움직이라는 구속조건이 주어지면 자유도는 1개가 된다. N개의 자유입자들로 이루어진 한 계는 3N개의 자유도를 갖고, 하나의 강체는 6개의 자유도(3방향:X, Y, Z)축의 병진운동과 3방 향(X, Y, Z)의 회전운동)를 갖는다. 한 축(Z)에 관하여 회전하는 강체는 1개의 자유도를 갖는다. 수평면상에서 회전하고 있는 디스크는 미끄러짐을 허용한다면 그 운동을 기술하기 위하여 극좌표계구성의 3 변수와, 평면에 수직인 축에 대한 디스크의 회전각 1변수의 4개의 자유도를 갖는다.
ㆍ반면에 미끄러짐이 없다면, 수평면상을 구르는데 자유롭고, 평면에 수직인 축에 대한 디스크 의 회전각 1변수를 주면 구속조건이 주어져서 2개의 자유도를 갖게 됩니다. 수학적으로 보면, C개의 독립구속조건을 갖는 N개의 입자로 구성된 (Holonomic System)계의 자유도는 3N-C입니다.
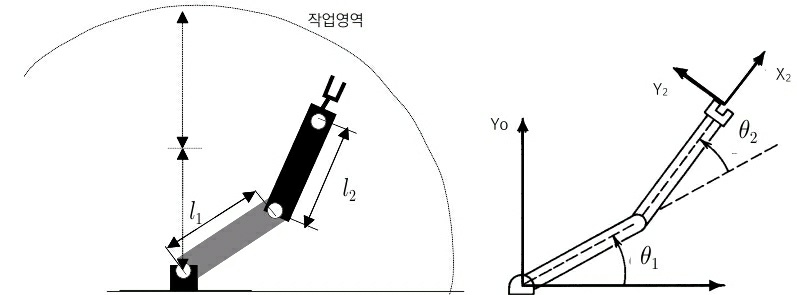
작업영역
매니퓰레이터는 그 제어가 매우 복잡하게 되어지나, 그 자체의 특징 때문에 이에 대한 연구가 활발히 진행이 되고 있다.
매니퓰레이터가 작업을 할 수 있는 영역은 매니퓰레이터가 도달할 수 있는 영역을 뜻하며, 이를 작업공간 혹은 작업영역이라 하며, 이러한 영역은 그 도구가 도달할 수 있는 영역은 도달가능영역과 임의의 자세로 도달할 수 있는 영역인 임의자세 도달가능영역(dextrous workspace)으로 나눌 수 있다. 임의 자세 가능영역은 당연히 도달 가능 영역의 부분집합임을 짐작할 수 있다.
‘아이언맨’ 현실의 영웅으로 탄생한다
ㆍ국내에서 개봉된 영화 '아이언 맨2'가 관심을 모으고 있는 가운데 실제 이 영화에서 처럼 가공할 위력을 갖지는 못하지만, 인간이 로봇을 착용함으로 인간의 근력이 한층 강화되도록 하는 근력증강 로봇(wearable robot)기술에 대한 연구가 활발히 진행되고 있다.
ㆍ근력증강 로봇기술은 노약자 및 장애인의 활동을 보조하고, 산업현장에서 중량물을 핸들링 하며, 군사 및 사회안전 분야에 사용되는 등 많은 분야에서 수요가 확산되고 있으며, 기술 적 가능성이 점차 현실화되어 감에 따라 관련 특허출원도 크게 증가하고 있다.
ㆍ특허청에 따르면, 지난 20년간 근력증강 로봇과 관련하여 해마다 큰 폭의 증가세를 보이고 있다.
ㆍ특허출원된 근력증강 로봇분야는 상지착용형, 하지착용형 그리고 파워 어시스트운용 제어기 술 등 크게 3분야로 나눌 수 있다. 국내 출원의 경우, 하지착용형(38건) 및 파워 어시스트운 용 제어기술(28건) 분야에 연구가 중점적으로 진행되고 있으며, 이러한 기술동향은 로봇기술 이 가장 발달한 미국과 일본의 특허출원에서도 유사하게 나타나고 있다.
ㆍ근력증강 로봇을 포함한 전체 로봇분야의 세계시장이 2018년경에 2,200억달러 정도의 시장 을 형성할 것으로 예상되고 있는 가운데, 특허청은 국내 로봇산업발전을 위해 다양한 정책 을 추진하고 있다.
ㆍ정부는 근력증강 로봇 기술은 노약자 및 장애인의 활동 보조 뿐만 아니라 산업현장, 군사 및 사회안전 등 각 분야에 활용할 수 있도록 다양한 정책을 추진면, 2018년에는 2천200억 달러의 시장이 창출될 것으로 보인다.
ㆍ한편, 국내연구원은 “근력증강 로봇기술은 ‘인간의 가장 원초적인 욕구를 충족시키기 위한 인간 중심적 첨단 융복합 기술’이라는 측면에서 향후에 핵심기술을 보유한 국가가 누릴 독점 권은 상상을 초월하므로, 우리가 확보할 수 있는 기술을 특화하고 심화시켜 우리 고유의 근력증강로봇 기술 포트폴리오를 구성해야 한다” 라고, 근력증강 로봇 등 로봇기술에 대한 중요성을 강조했다.
'IT' 카테고리의 다른 글
| 로봇의 구성요소(2) - 액츄에이터 (0) | 2022.04.06 |
|---|---|
| 로봇의 구성요소 - 말단효과장치(End effector) (0) | 2021.05.21 |
| 매니퓰레이터(Manipulator) - 조인트(prismatic, lower pair) (0) | 2021.05.20 |
| 로봇의 구성요소 (매니퓰레이터, 말단효과장치, 액츄에이터, 센서, 제어기, 처리기, 소프트웨어) (0) | 2021.05.20 |
| 진화하는 로봇 산업과 사회 (0) | 2021.05.19 |



