
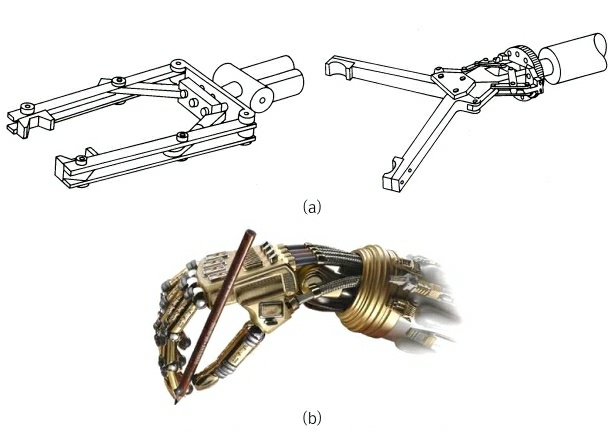
로봇은 주로 산업용으로서, 암(Arm) 선단에 설치한 말단효과장치(end effector)가 대상물을 잡아 소정의 위치에 이동시키거나 작업을 실시한다. 말단효과장치(End effector)란 사람의 손에 해당하는 부분으로 물건을 잡는 그리퍼형, 다관 절으로 구성된 손가락 형태로 나누어진다.
작업 대상물을 잡는 그리퍼(Gripper), 대상물을 도장하는데 사용하는 스프레이 건, 스폿 용접의 전극 접점, 용접의 용접 토치, 드릴, 그라인더, 절단용 워터 제트 등 기기나 용구의 총칭 으로서, 로봇 암 선단에 달아 사용하는 것을 말한다. ‘효과기’라고도 불리지만 관련서적에서는 말단효과장치(end effector) 라고 표기되는 경우가 많으며 사람의 손에 해당된다.
공구(tool) 또는 장치가 로봇의 기계적 팔에 부착되면 로봇은 생산기계가 될 수 있다. 로봇의 공구는 몇 개의 이름들로 불리어진다. 가장 자주 사용되는 용어가 말단장치(end effector) 이나, EOAT(end-of-arm-tooling) 이라는 용어도 산업현장에서 일반적으로 사용된다.
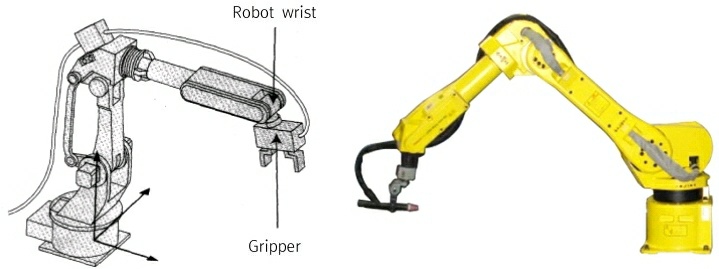
만약 말단장치가 기계적으로 열리고 닫히는 장치라면, 그것은 그리퍼(gripper)라 부른다. 만약 말단장치가 공구 또는 특별한 부착물이라면 그것은 공정 공구(process tooling)라고 부른다. 전기적으로 제어되는 산업용 로봇 Motoman-SK16는 6자유도와 그리퍼를 나타낸다. 이 로봇은 용접, 조립 및 재료 가공용으로 설계된 관절형 로봇이다. 산업용 로봇 Cincinnati Milacron T3 776은 손목과 공구를 갖는다. 이 로봇은 중량물 공정의 응용에 사용되도록 설계되었다.

작동의 형태에 따라서 종래의 말단장치는 다음과 같은 다양한 장치와 공구가 부착된다.
1) 재료 가공용 그리퍼, 훅, 스쿠프, 전자석, 진공 컵, 점착성 손가락 2) 페인팅용 스프레이-건 (spray gun) 3) 점 용접, 아크 용접 및 아크 절단용 부착물 4) 드릴, 너트 드라이버와 버 (burr) 와 같은 전동공구 (power tool) 5) 기계가공과 조립용 특별한 장치와 고정구 (fixture) 6) 다이얼 지시기와 깊이 게이지 등과 같은 측정계기 (measuring instrument) 그림은 다양한 작업을 수행하기 위하여 말단장치에 부착된 다양한 장치와 공구를 보여주고 있다.

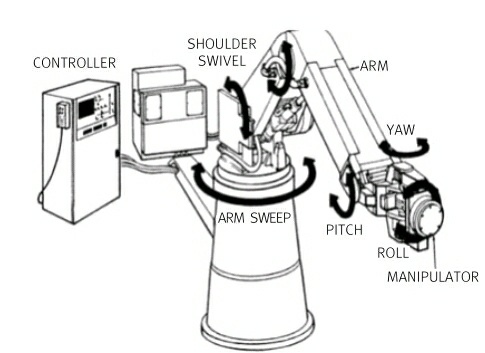
공구 중심점(TCP: tool center point)은 좌표계의 원점이거나 로봇 팔에 부착된 공구의 동작점이다. 좌표계의 원점은 매니퓰레이터의 공구 장착판 위에 위치한다는 것을 볼 수 있다. 이러한 위치로부터 x, y, z 축의 방향을 알 수 있다. 매니퓰레이터의 모든 이동은 공간상의 이위치로부터 기준이 된다.
공구가 공구 장착판에 설치되면 좌표계의 원점은 TCP인 새로운 위치로 이동한다. 말단장치는 특별한 응용분야의 요구사양을 충족시키기 위하여 일반적으로 고객의 주문으로 만들어진다. 기계적 그리퍼가 가장 일반적으로 사용되며, 2개 또는 그 이상의 손가락(finger)을 장착하고 있다. 특정한 응용에 적합한 말단장치의 선택은 작업하중, 환경, 신뢰성과 비용과 같은 요인들에 의해 의존한다.

'IT' 카테고리의 다른 글
| 로봇의 구성요소(2) - 액츄에이터 - 모터의 구분 (0) | 2022.04.07 |
|---|---|
| 로봇의 구성요소(2) - 액츄에이터 (0) | 2022.04.06 |
| 매니퓰레이터 - 자유도(degree of freedom), 아이언맨 (0) | 2021.05.20 |
| 매니퓰레이터(Manipulator) - 조인트(prismatic, lower pair) (0) | 2021.05.20 |
| 로봇의 구성요소 (매니퓰레이터, 말단효과장치, 액츄에이터, 센서, 제어기, 처리기, 소프트웨어) (0) | 2021.05.20 |



