
작업 영역이란 매니퓰레이터의 공구단(End-Effector)이 도달할 수 있는 3차원 공간의 점들의 집합이라고 정의 될 수 있다. 매니퓰레이터의 베이스에서 첫 세 관절을 주축, 나머지 세 관절들의 축을 보조축이라면, 일반적으로 주축에 의해서 매니퓰레이터의 작업기구의 위치가 정해 지며 보조 축에 의해서 그 방향이 정해진다. 작업 영역에 따른 매니퓰레이터의 분류는 주축의 움직임에 따라 생성되는 매니퓰레이터의 작업영역의 기하학적인 형태에 의해서, 직교 좌표형 (Cartesian)로봇, 원통형(Cylindrical)로봇, 구형(Spherical)로봇, 스카라형(SCARA)로봇, 다관절 (Articulated)로봇 등으로 나눌 수 있다.
작업영역에 따른 분류
ㆍ직교 좌표형 로봇 : Cartesian/rectangular/gantry (3P) : 3 Prismatic joint
ㆍ원통형 로봇 : Cylindrical (R2P) : 2 Prismatic joint and 1 revolute joint
ㆍ구형 로봇 : Spherical (2RP) : 1 Prismatic joint and 2 revolute joint
ㆍ스카라형 로봇 (2RP): Selective Compliance Assembly Robot Arm (SCARA): 2 paralleled revolute joint and 1 additional prismatic joint
ㆍ다관절 로봇 : Articulated/anthropomorphic (3R) : All revolute (Human arm)
(1) 직교 좌표형 로봇(Cartesian/rectangular/gantry)-3P
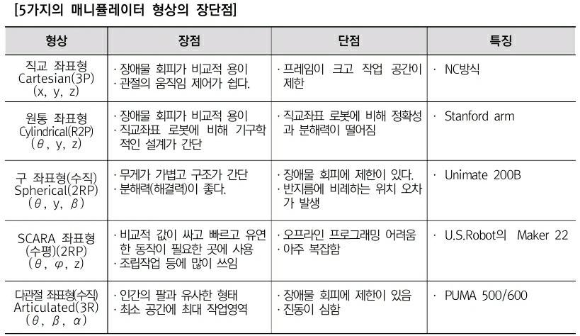
이 로봇은 관점 축 방향의 3개의 직교하는 축을 가지고 있어서 작업영역은 직육면체이며, 갠트리 로봇(이동 기중기 로봇) 등이 이에 속하며, IBM의 RS-1과 Olivetti의 SIGMA 로봇이 있다. 이 로봇은 분해력(resolution)과 정확성이 좋고, 장애물 회피가 비교적 용이하고, 관절의 움직임을 제어하기 쉬운 장점이 있는 반면에 프레 임이 크고 작업 공간이 제한되어 있고, 직선 운동을 위한 기구학적인 설계가 복잡하고, 운용을 위해 넓은 바닥이 필요한 것과 같은 단점이 있다. 특히 NC방식을 취하기 쉽다.
(2) 원통형 로봇(Cylindrical)-R2P
직교좌표 로봇들의 첫번째 관절이 회전 관절로 대치된 형태이며, 그 작업영역은 원통형이다. 대표적인 예로서는 Prab사의 Versation Model F6000및 Stanford arm 등이 있다. 이 로봇은 장애물 회피가 비교적 용이하고, 직교좌표 로봇에 비해 기구학적인 설계가 간단한 장점이 있는 반면에 구조가 크고 직교좌표 로봇에 비해 정확성과 분해력이 떨어지는 단점이 있다.
(3) 구형 로봇(Spherical)-2RP
이 로봇은 원통형 로봇의 2번째 관절이 회전 관절로 대체된 것이며 작업영역이 구의 형태를 취하고 있다. 그 대표적인 예로는 Unimation 사의 Unimate 200B 등이 있다. 이 로봇은 무게가 가볍고 구조가 간단하고, 분해력이 좋은 반면에 장애물 회피에 제한이 있고 반지름에 비례 하는 위치 오차가 큰 단점이다.
(4) SCARA형 로봇(Selective Compliance Assembly Robot Arm)-2RP
구형 로봇처럼 2개의 회전관절과 1개의 미끄럼 관절을 가지고 있으나 그림에서 보는 것처럼 3축이 모두 수직적인 형태를 가졌다. 이 로봇은 비교적 값이 싸고 빠르고 유연한 동작이 필요한 곳에 사용이 되며 특히 조립작업 등에 많이 쓰인다. 예로서는 U.S.Robot의 Maker 22 등이 있다.
(5) 다관절(회전관절) 로봇(Articulated/anthropomorphic)-3R
이 로봇은 인간의 팔과 유사한 형태를 하고 가졌으며 회전 관절 로봇이라 불리기도 하며, 대표적인 예로는 PUMA 500/600 시리즈, Cincinnati Milacron의 T3 등이 있다. 이 로봇은 작업물로의 접근이 없고 다른 로봇과의 작업영역에 호환성이 있는 장점이 있으나 해결력(분해력)과 정확성이 떨어지며 장애물 회피에 제한이 있고 진동이 심한 단점이 있다. 또한 교육에 있어서 관절간의 계산이 복잡하다.
산업용 로봇의 분류
□ 산업용 로봇의 분류(형태별)
1) 제어축수에 의한 분류 - 3축 제어 로봇 (3 axes Robot) - 4축 제어 로봇 (4 axes Robot) - 5축 제어 로봇 (5 axes Robot)
2) 제어형태에 의한 분류 - 시퀀스 컨트롤 로봇 (Sequence controlled Robot) - 상각궤도 조작 로봇 (Trajectory operated Robot) - 적응제어 로봇 (Adaptive Robot) - 원격조정 로봇 (Tele operated Robot)
3) 기계적 구조에 의한 분류 - 직교 좌표형 로봇 (Cartesian/gantry (3P)) - 원통형 로봇 (Cylindrical (R2P)) - 구형 로봇 (Spherical (2RP)) - 스카라형 로봇 (SCARA(2RP)) - 다관절 로봇 (Articulated/anthropomorphic (3R))
'IT' 카테고리의 다른 글
| 자유도에 따른 로봇 분류 (0) | 2021.05.18 |
|---|---|
| 제어법에 의한 로봇 분류 - 서보제어 (0) | 2021.05.16 |
| 구동법에 의한 로봇 분류 (0) | 2021.05.16 |
| 로봇의 2가지 분류 - 매니퓰레이터, 이동로봇 (0) | 2021.05.15 |
| 군사용 로봇의 역할과 종류 (0) | 2021.05.15 |



